車両と生産オートメーションの間をつなぐ
End-of-Line-Tests (エンドオブラインテスト)
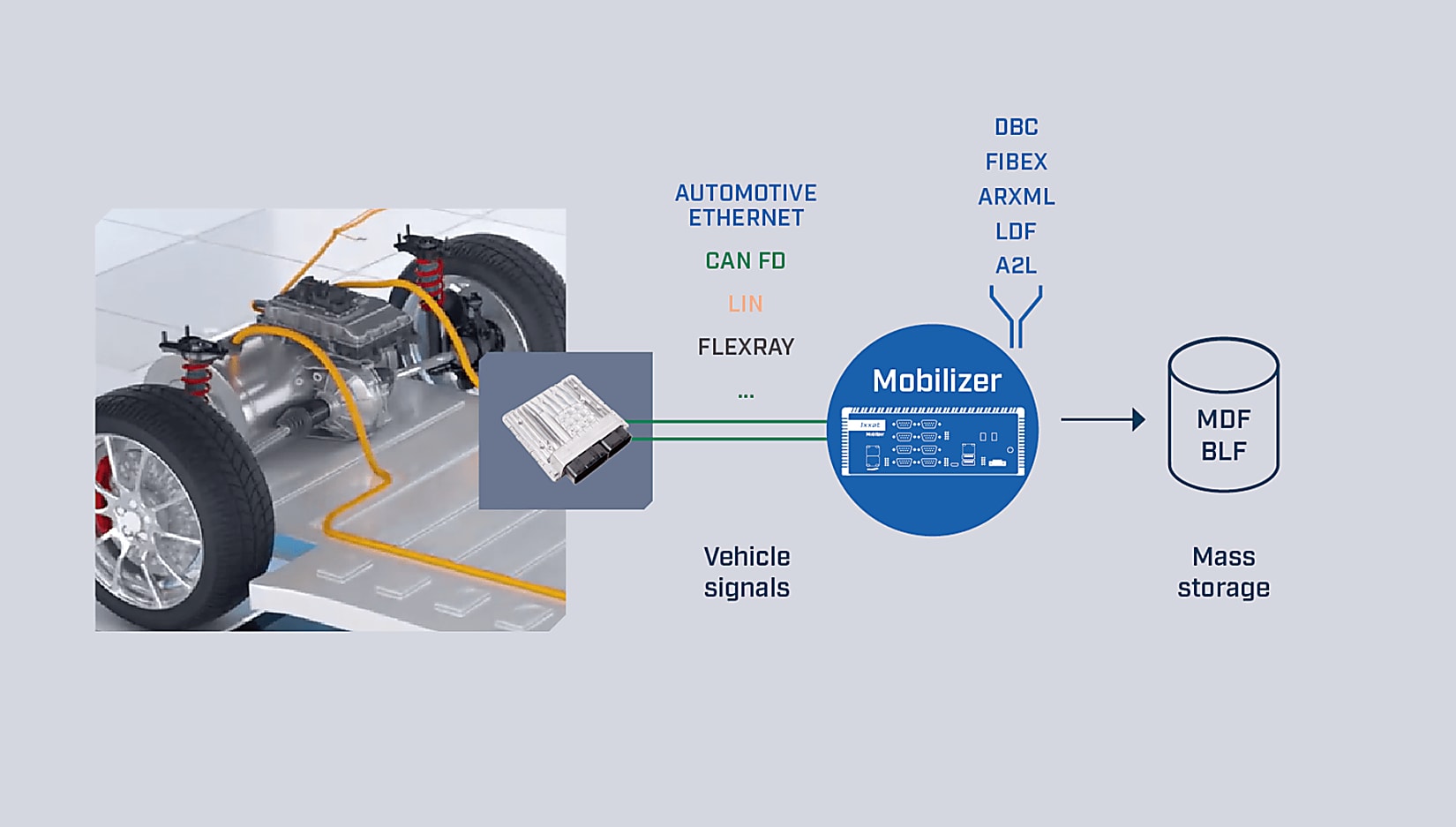
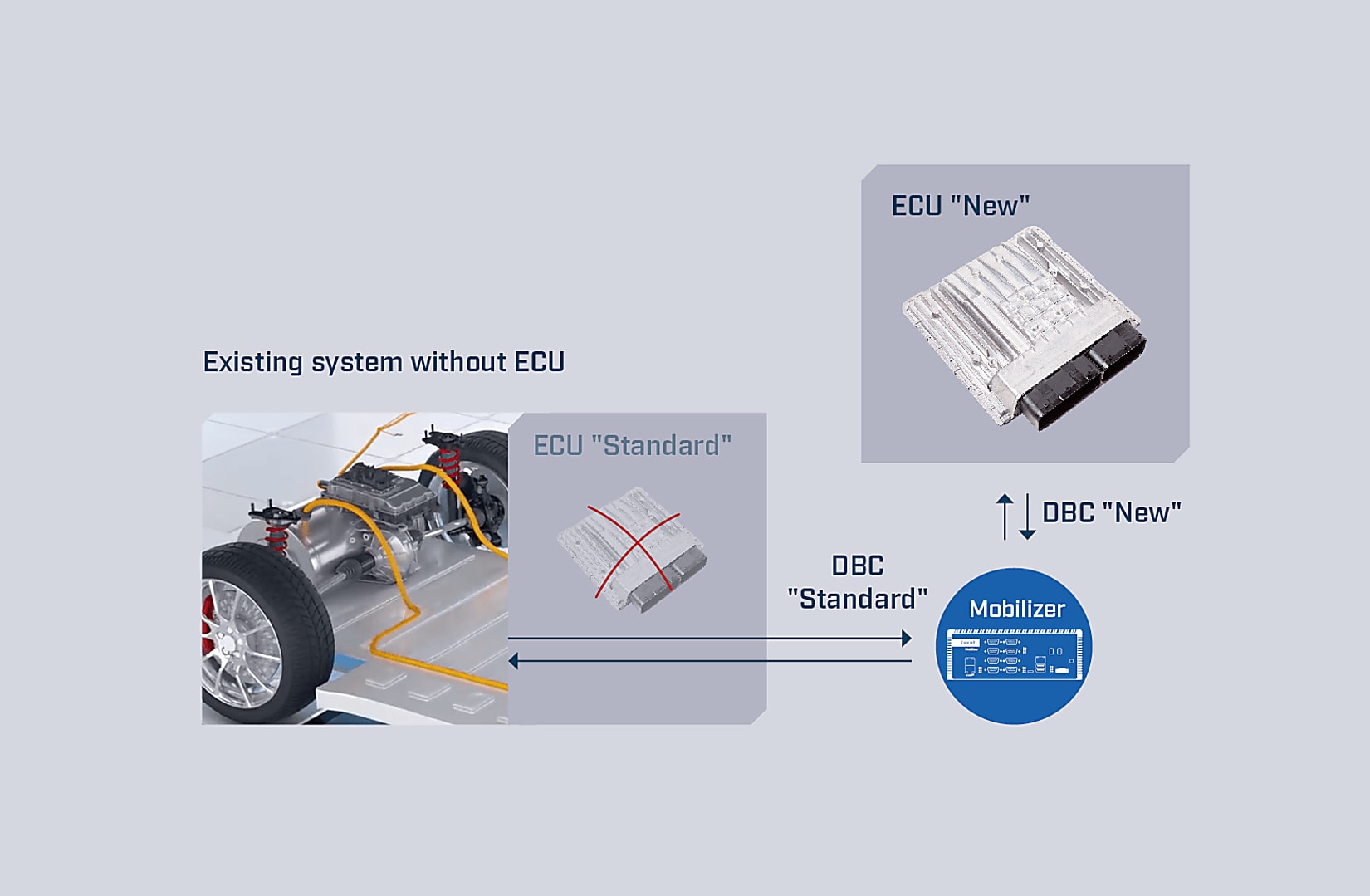
バッテリー駆動車両のエンド・オブ・ラインテストでは、さまざまなシステムが過酷な条件下で相互に通信を行います。車両ネットワークと生産オートメーションシステムを接続する際には、異なる技術・プロトコル間での通信に加え、部品を過電圧や電磁的な影響から保護することも重要です。HMSの製品を活用することで、テストに集中し、通信の複雑さは私たちにお任せいただけます。
- BMS(バッテリーマネジメントシステム)との通信およびフラッシング
- オートメーションシステムへの接続
- レストバスシミュレーション
- 過電圧保護対策