Unser Anspruch
Datenwelten verknüpfen
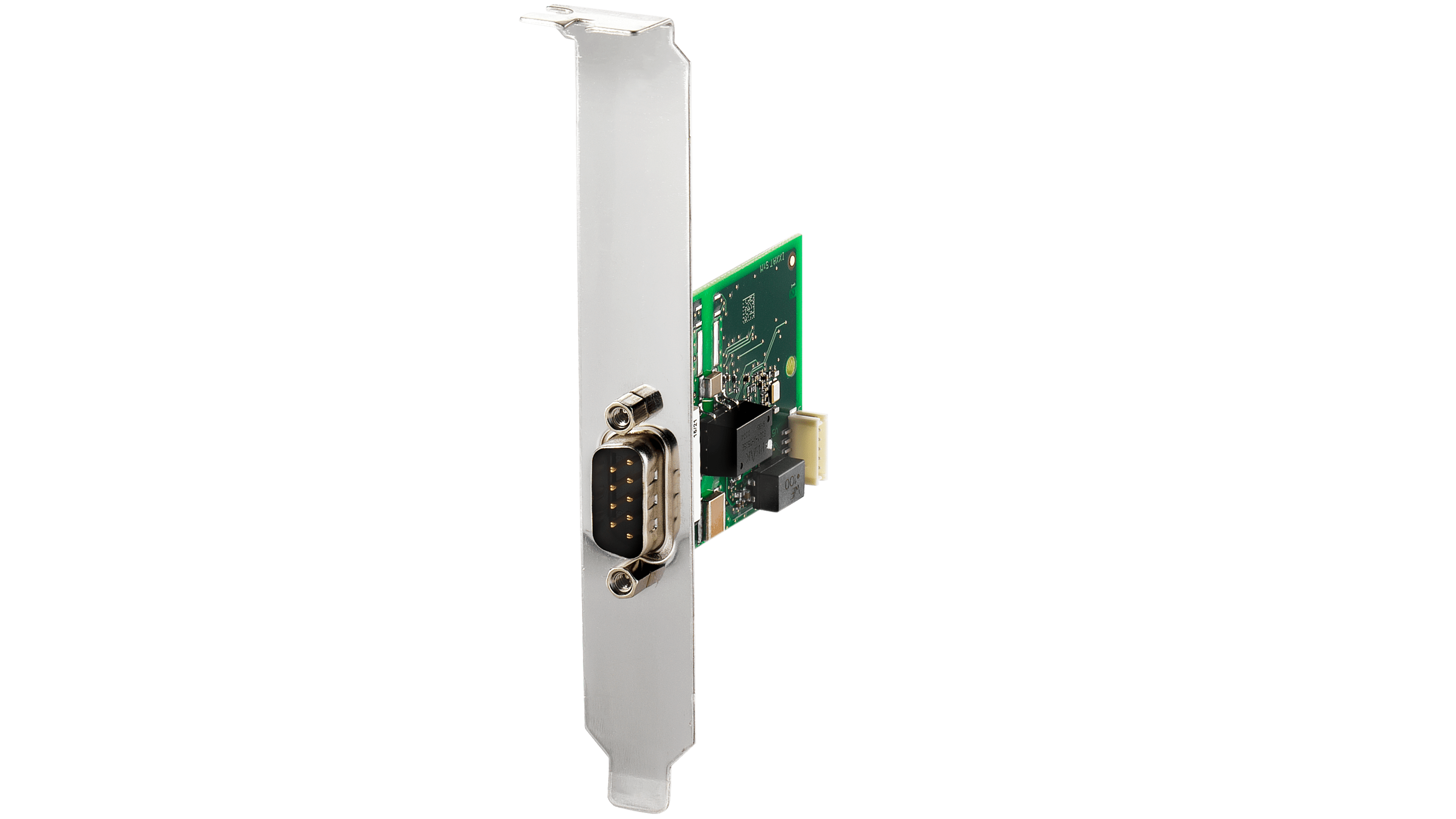
Ixxat USB-to-CAN-Adapter verbinden zwei Datenwelten: Feldbussysteme für CAN/CAN-FD und LIN sowie Rechner mit USB-Schnittstelle. Barrierefreie Kommunikation, Schnelligkeit, Sicherheit und Zuverlässigkeit sind hierbei gefragte Eigenschaften. USB-to-CAN-Konverter bieten verschiedene Anschlussmöglichkeiten und Formfaktoren, um auch komplexen Anforderungen gerecht zu werden.